Как робот-спелеолог исследует пещеры на Луне?

Так называемые лунные пещеры или лавовые трубы образовались из-за лунной вулканической активности в далеком прошлом. Они были обнаружены на Луне еще в 2009 году, но с тех пор о них не очень многое стало известно. Существуют пещеры разных размеров, причем большинство исследований сходится в том, что некоторые из них могут вместить целые города. Но досконально исследовать их внутри все еще не получается.
Лавовые трубы могут быть не только местом для добычи нетронутых геологических образцов, но и выступать источником сырья — водяного льда для жизнеобеспечения космонавтов и ракетного топлива. Но самое главное, планировщики миссий почти уверены, что пещеры можно адаптировать под место обитания самих исследователей — в таких трубах возможно обеспечить защиту от космической радиации, экстремальных температур и микрометеоритов.
Но ученые не знают, существует ли вообще подходящая для жизни система пещер — требуется изучить их изнутри. А исследование лавовых труб — не самая простая задача. Сложность заключается в том, что наиболее очевидные пещеры имеют для входа только отверстия (световые люки) — ямы, обнаруженные орбитальными космическими аппаратами. Поэтому обычный ровер не может просто вкатиться в пещеру для исследования.
ESA совместно с Университетом Джеймса Мэдисона (JMU) представило прототип сферического робота, который будет использован для исследования пещер на Луне. Это спелеологический ровер под названием DAEDALUS диаметром около 46 см.

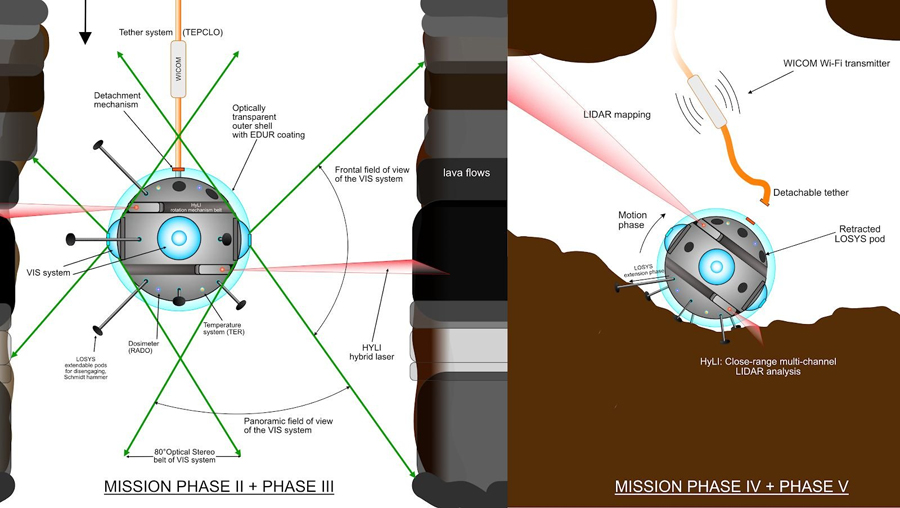
Сферический марсоход — уникальное изобретение и его форма особенно удобна для исследования пещер. Он может наблюдать пространство со всех сторон, в том числе под собой, не будучи заблокированным собственным корпусом. Робота-спелеолога опустят в световые люки на тросе, который заодно выступит в качестве приемника Wi-Fi для поддержания связи с Землей.
Оказавшись на поверхности, робот отсоединяется и откатывается. В движение его приводят выдвижные стержни, которые также используются для устранения препятствий и анализа свойств породы. Робот «рассматривает» свое окружение в 3D-проекции с помощью лидара и камер, действующих, как система стереовидения, а также измеряет в пещере температуру и радиацию. Это не только даст ученым возможность заглянуть в лунный подземный мир, но и может сказать, насколько устойчивы стены и из каких пород они состоят. Также сканирование позволит составить карту пещеры и определить ее вместительность даже в темноте.
На сегодняшний момент было построено уже три прототипа DAEDALUS для тестирования датчиков и систем локомоции. Последний прототип наделен высокой автономностью. Команда JMU спроектировала его в рамках крупной исследовательской программы по освоению лунных пещер. Всего для участия в программе было направлено пять заявок с идеями, среди которых — привязные вездеходы, рой роботов, гравиметрические геодезисты. Теперь ESA изучает только два проекта. Второе решение — подъемный кран, который опустит в пещер вездеход, привязанный к соединительному кабелю для питания энергией и связи с Землей.
Источник: https://zoom.cnews.ru/rnd/article/item/kak_robotspeleolog_issleduet_peshchery_na_lune
Подписаться